Swarm robotics: Legged robots connect, form centipede-like robot in new system
- Swarm robots maneuver in coordinated ways to achieve goals, all without the centralized control of a human being.
- The field of swarm robotics was inspired by examples of swarm intelligence in nature, such as army ants that build living bridges out of their own bodies to cross difficult terrain.
- In a recent study, researchers created a new way for swarm robots to maneuver on the ground.
When colonies of army ants are foraging through the forest for food or supplies, they often stumble upon gaps in the terrain across which individual ants cannot pass. So they build bridges — not out of twigs or leaves but of themselves. Without any leader calling the shots, the insects somehow collectively decide to tangle their bodies into a living bridge that enables some of the ants to cross the gap and reach the target.
This is swarm intelligence. The term describes the collective, decentralized behavior of agents — biological or artificial — that maneuver in coordinated ways to achieve goals. Honey bees engage in swarm intelligence when they send out “scout bees” to find new locations for colonies. Birds exemplify it when they form flocks to find food and migrate to roosts. And fish use it when they form schools, enabling them to monitor for predators with thousands of eyes instead of just two.
In other words, it’s strength and smarts in numbers. These collective animal behaviors have inspired the field of swarm robotics, which aims to create groups of simple robots that collaborate in a self-organizing fashion to perform tasks that any one of the individual robots likely would not be able to achieve on its own.
Swarm robots don’t need to be highly sophisticated or expensive to perform complex tasks. Rather, algorithms can assign simple rules for all of the individual robots to follow, such as “move toward a light source.” Then, through interactions among the robots, complex behaviors can emerge. But these emergent behaviors are more difficult for robots to achieve in certain environments.
Terrestrial swarm robots
In a study recently published in Science Robotics, researchers explored new ways to improve the locomotive abilities of swarm robots on the ground, which is often the most difficult environment for robots in terms of movement.
After all, air and water are relatively predictable environments, while terrain presents swarm robots with diverse and complex obstacles that they need to overcome, all without getting stuck. But terrestrial robots do have one major advantage over their air- and water-based counterparts: physical contact. Like ants that entangle themselves to form a bridge, ground-based robots can more easily merge together to become stronger and more versatile than the mere sum of their parts.
The results of the recent study suggest that the performance of simple terrestrial robots can be greatly improved by using a modular, reconfigurable, and stability-encouraging design that enables individual robots to connect to each other in situations where doing so will help them move more effectively or accomplish tasks.
A centipede design
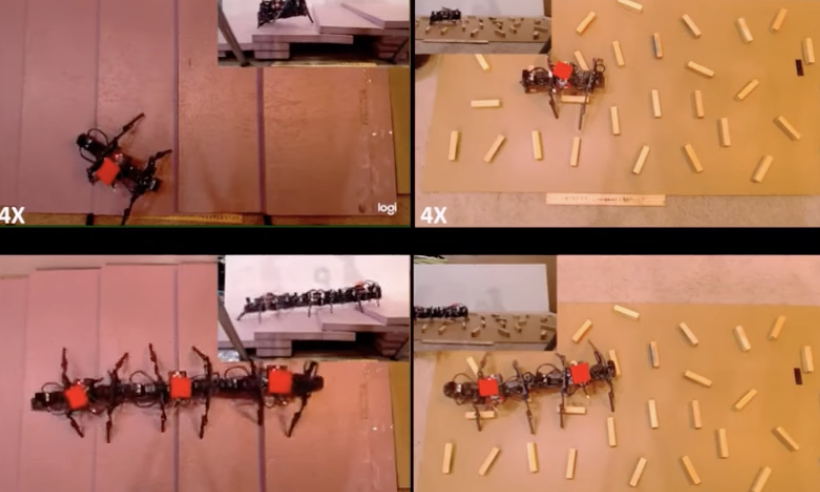
The robots built for the study were about six inches long and had four legs, a flexible tail that improved stability, a light sensor, a battery, and a magnetic connector that allowed the robots to dock to each other to form a larger robot, resembling a centipede. In multiple experiments, the robots attempted to travel toward or carry objects to a target area represented by a light source, which they detected with their light sensors.
All the robots had the same 3D-printed hardware. However, one of the robots was programmed to be slightly more likely to use its light sensor to search for the light source. This was called the “searcher robot.” Whenever the searcher robot would get stuck trying to perform tasks in the experiments — climbing stairs, traversing rough terrain, or crossing a gap — the so-called “helper robots” would automatically find and attach themselves to the searcher robot and resume working toward their goal collectively.
Flexibility is a major benefit of the system: Single robots are best suited for completing some tasks, while a connected configuration better accomplishes others.
“When the task is relatively simple (e.g., object transport on flat ground) or the task inherently requires a small single unit (e.g., object transport in a narrow tunnel), it is more cost effective to use single robots,” the researchers wrote. “However, to solve high-level tasks, such as obstacle traversal and object transport in rough terrain, the units establish physical connections with each other and can organize into a larger multilegged system.”
Future applications of terrestrial swarm robots
The researchers noted that their approach could help “enlighten the design of future legged swarms that can adapt to unforeseen situations and perform real-world cooperative tasks,” including search-and-rescue operations, environmental monitoring, object transport, and space exploration.
Swarm robotics is still a nascent field. Although swarm robots are currently being used in a handful of applications, such as monitoring water quality and crop health, it is still difficult if not impossible to utilize swarms in the real world without some form of centralized control from humans.
But the applications of swarm robotics aren’t limited to the physical world. Swarm AI can also be used to generate better group decisions in fields like finance, medical diagnoses, and famine forecasting, as Louis Rosenberg, the founder of Unanimous AI, noted in a recent article for Big Think.